Hello, I am Sophie
Robotics and Machine Learning Researcher
Focusing on
About Me
Hi, I'm Sophie — a researcher in embodied AI focused on multimodal agents that understand 3D space and turn language or video into reliable actions. I'm currently working on risk-aware Bayesian optimization and an agentic aerial cinematography system guided by VLMs, validated on a ROS2/Unity/Vicon pipeline.
As a developer, I build end-to-end, reproducible systems in Python/C++ with ROS2, Unity, and modern ML tooling. I care about careful evaluation, clean interfaces, and integrations that move ideas from simulation toward real-world deployment.
Projects
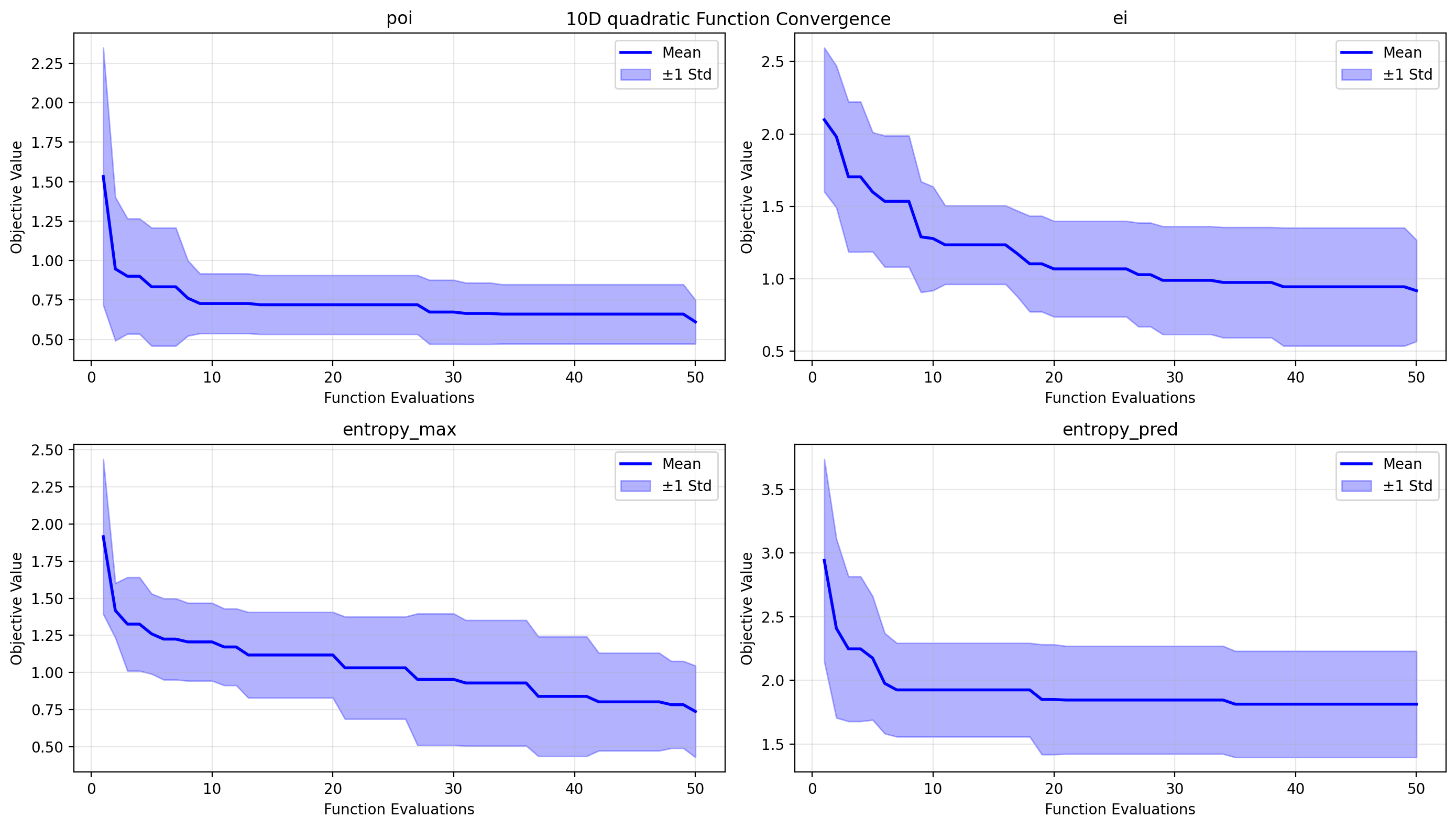
Bayesian Optimization under Uncertainty
Robust Gaussian Process and entropy-based Bayesian optimization framework under uncertainty.
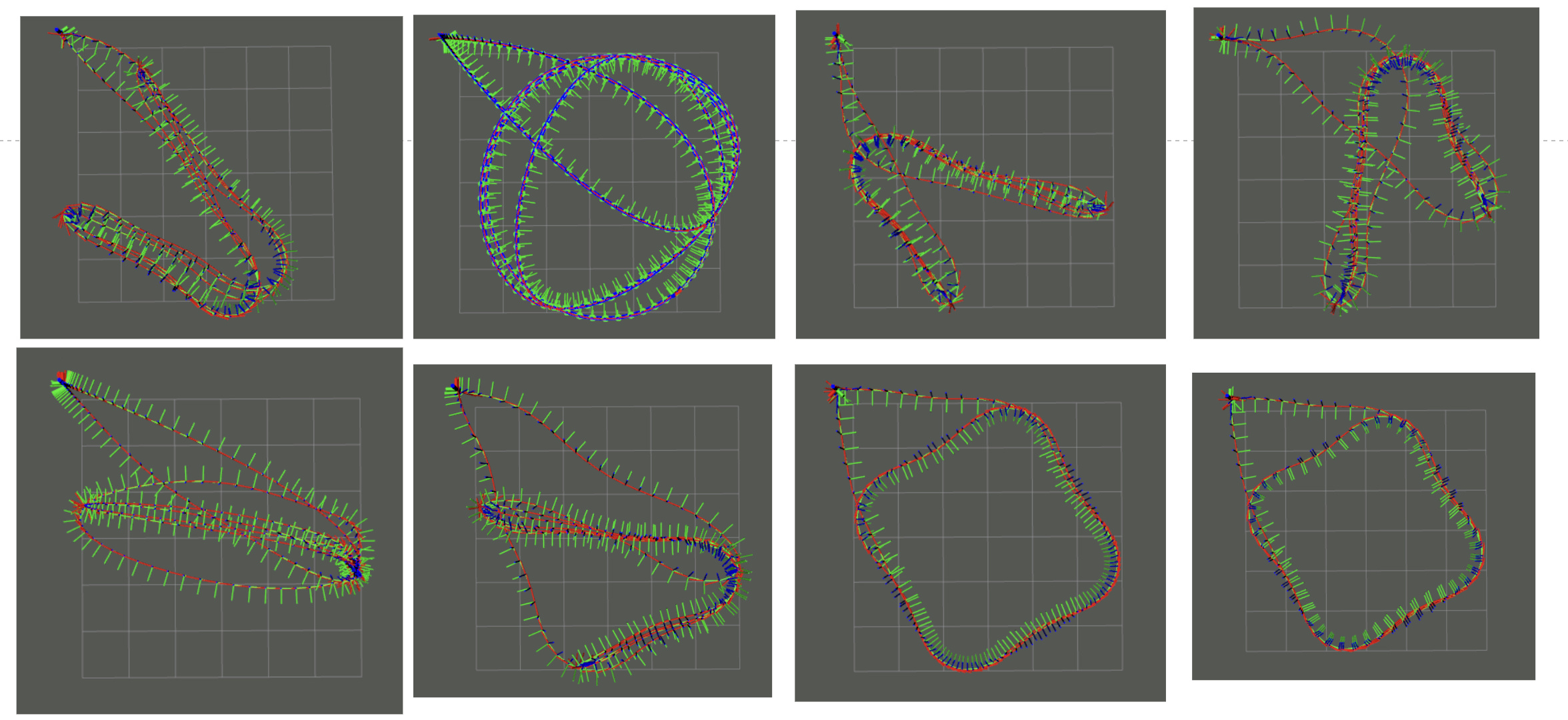
Drone Acrobatics
Developed and benchmarked a GRU-based deep learning flight controller trained on synthetic FlightGoggles/TOGT-planner data with noise and occlusion—to predict 6-DOF drone control commands for high-speed trajectory following, evaluated against MPC via Dynamic Time Warping.
FilmList
Swift-based iOS app featuring real-time TMDB API integration alongside a Supabase (PostgreSQL) backend for efficient data retrieval and indexing.
Background
Education
Bachelor of Applied Science in Engineering Science
University of Toronto • 2023-2028
Specializing in Machine Intelligence
Research Experience
Toronto Robotics and AI Laboratory (TRAIL)
2025 - Present
Anomaly detection for autonomous driving
Béland Research Group, University of Toronto
Oct 2024 - Present
Bayesian optimization under uncertainty, entropy-based acquisition function
Multifunctional Structures Lab, University of Toronto
May 2024 - Aug 2024
Computational topology optimization for partially dense materials
Extracurriculars
University of Toronto Robotics Association, Autonomous Rover Team
Sep 2024 - May 2025
Developed ramp-detection algorithm using odometry and LiDAR point clouds through sensor fusion
University of Toronto Autonomous Drone Racing, AI team
Sep 2024 - May 2025
Developed PPO-based drone controller autonomous navigation and flight control
Skills & Interests
Programming
Robotics
ML/AI
Tools/Misc
Personal Interests
Photography
I love capturing moments and telling stories through my lens. From street photography to nature shots, I find beauty in the everyday and the extraordinary.
View my photos →Technology & Innovation
I'm constantly exploring new technologies and staying up-to-date with the latest developments in software engineering and artificial intelligence.
Resume & Contact
Feel free to reach out to me through any of the following ways or check out my resume to learn more about my skills and experience.